Mar 2026
Robot Learning on a Bi-manual Setup
Built a bimanual leader-follower setup to train imitation learning models for short-horizon tasks at an 85 percent success rate.
read more »

Robot Learning · Mechatronics · ETH Zürich
I'm an undergraduate at ETH Zürich studying Electrical Engineering. I love everything about robotics and am always tackling a full-stack project in order to gain as much technical expertise as possible.
Currently, I am exploring robot learning, training VLAs and World Models on custom-built robotic setups, with both parallel grippers and humanoid hands.
When I'm not working on projects, I play football or guitar, pick up a new language, or intern at cool robotics startups.
Selected work
Mar 2026
Built a bimanual leader-follower setup to train imitation learning models for short-horizon tasks at an 85 percent success rate.

May 2025
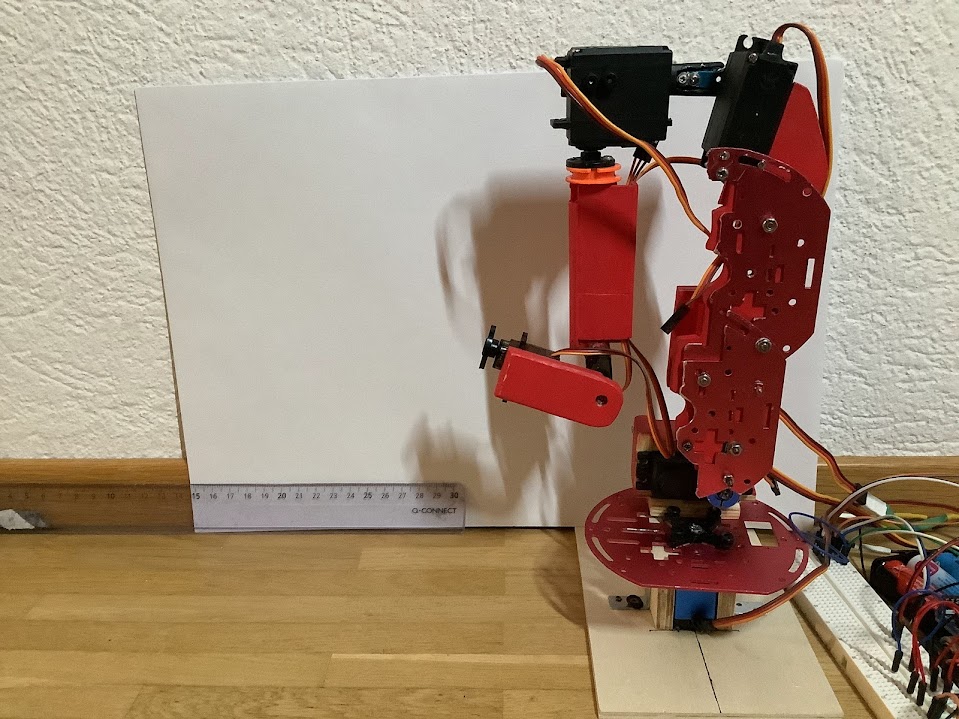
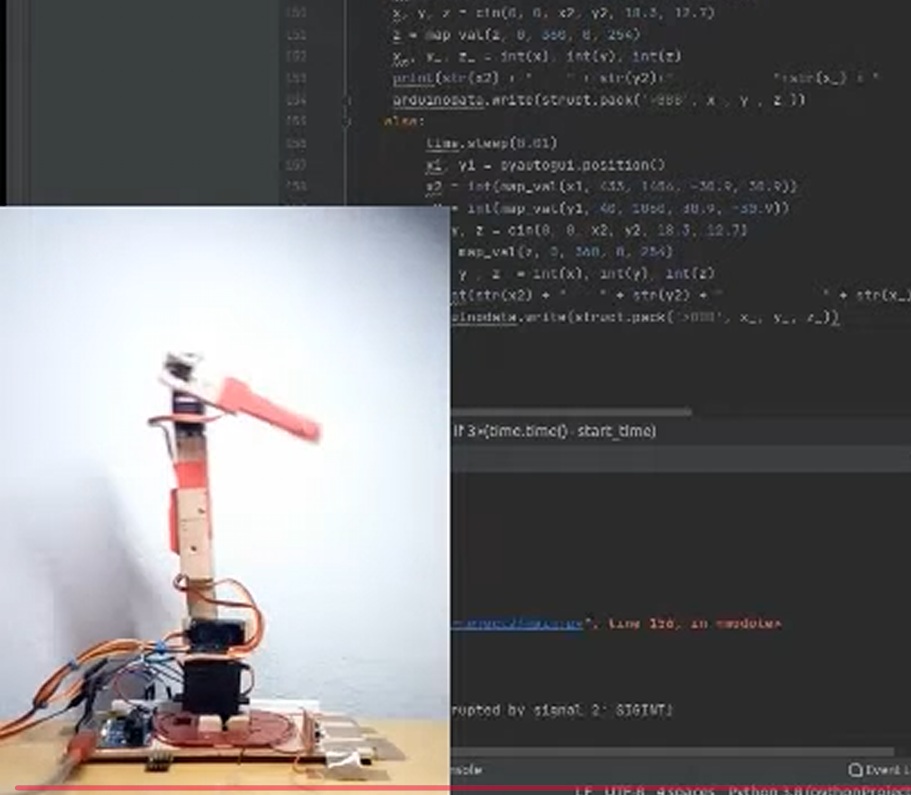
Designed a 6-DOF arm controlled via IMU at ETH PBL, translating board orientation directly into joint commands.
Jan 2024
Built a 4-DOF arm and derived inverse kinematics from first principles. High school thesis, grade 6/6.
Jul 2021
Closed-form geometric IK solver for a 2-DOF planar linkage. My first foray into robot kinematics.
Active projects (currently working on them )
 coming soon
coming soon
2026 →
Building a teleop + data-collection rig for humanoid manipulation: hardware, control, and learning stack.
 coming soon
coming soon
2026 →
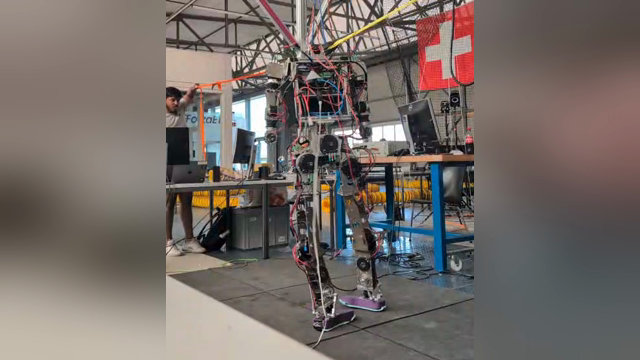
With the ETH Robotics Club, our team is building the first student-built humanoid robot in Europe: full-stack hardware, electronics, and control.
Background






Writing
a place where I structure some unstructured thoughts.
Recognition
 1st place, National Mathematics Olympiad, Colombia.
1st place, National Mathematics Olympiad, Colombia.
3rd place, National Mathematics Olympiad, Colombia.
1st place, National Mathematics Olympiad, Colombia.
1st place, National Mathematics Olympiad, Colombia.
3rd place, National Mathematics Olympiad, Colombia.